Publications
You can also check out my Google Scholar profile.* indicates equal contribution. (Co-)First-authored papers are highlighted.
2026
Miniaturized Pneumatic Actuator Array for Multipoint Deep Pressure Tactile Stimulation
Ava Chen, Megan C. Coram, Cosima du Pasquier, and Allison M. OkamuraWork-in-Progress Paper, IEEE Haptics Symposium 2026
arXiv / poster / video / abstract (+) abstract (-)
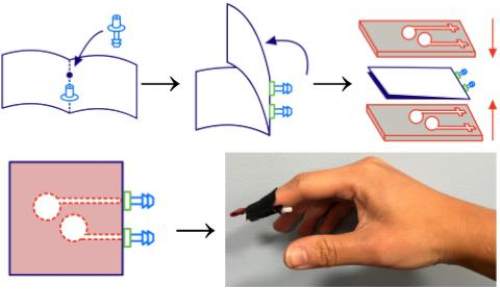
Wearable distributed tactile devices aim to provide multipoint touch stimuli, but struggle to provide sufficient forces (> 1 N) at frequencies to invoke deep pressure sensation with minimal encumbrance at small scales. This work presents a method of fabricating arrays of pneumatic actuators from thermoplastic-coated textiles. By routing pneumatic inlets to a common fold line in the fabric, we demonstrate that multiple pneumatic pouch actuators can be formed in a single simple heat-pressing operation that does not require the use of sacrificial blocking layers. The method accommodates a range of actuator diameters and spacing distances, including as compact as 8~mm diameter actuators spaced 1~mm apart, which enables use in fingertip wearable devices. In a blocked force test, these small pneumatic textile actuators exert 2.1 N when pressurized to 230~kPa. With this pair of actuators, we demonstrate an example application in which we invoke both distinct and summative stimuli, suggesting the possibility of titrating just noticeable difference in amplitude with a textile actuator array.
2025
ReactEMG: Zero-Shot, Low-Latency Intent Detection via sEMG
Runsheng Wang*, Xinyue Zhu*, Ava Chen, Jingxi Xu, Lauren Winterbottom, Dawn M. Nilsen, Joel Stein, and Matei CiocarliePreprint
arXiv / video / codebase / project website / abstract (+) abstract (-)
Surface electromyography (sEMG) signals show promise for effective human-machine interfaces, particularly in rehabilitation and prosthetics. However, challenges remain in developing systems that respond quickly and reliably to user intent, across different subjects and without requiring time-consuming calibration. In this work, we propose a framework for EMG-based intent detection that addresses these challenges. We cast intent detection as per-timestep segmentation of continuous sEMG streams, assigning labels as gestures unfold in real time. We introduce a masked modeling training strategy that aligns muscle activations with their corresponding user intents, enabling rapid onset detection and stable tracking of ongoing gestures. In evaluations against baseline methods, using metrics that capture both accuracy and stability for device control, our approach achieves state-of-the-art performance in zero-shot conditions. These results demonstrate its potential for wearable robotics and next-generation prosthetic systems.
Reciprocal Learning of Intent Inferral with Augmented Visual Feedback for Stroke
Jingxi Xu*, Ava Chen*, Lauren Winterbottom, Joaquin Palacios, Preethika Chivukula, Dawn M. Nilsen, Joel Stein, and Matei CiocarlieIEEE 2025 Intl. Conference on Rehabilitation Robotics (ICORR)
arXiv / poster / abstract (+) abstract (-)
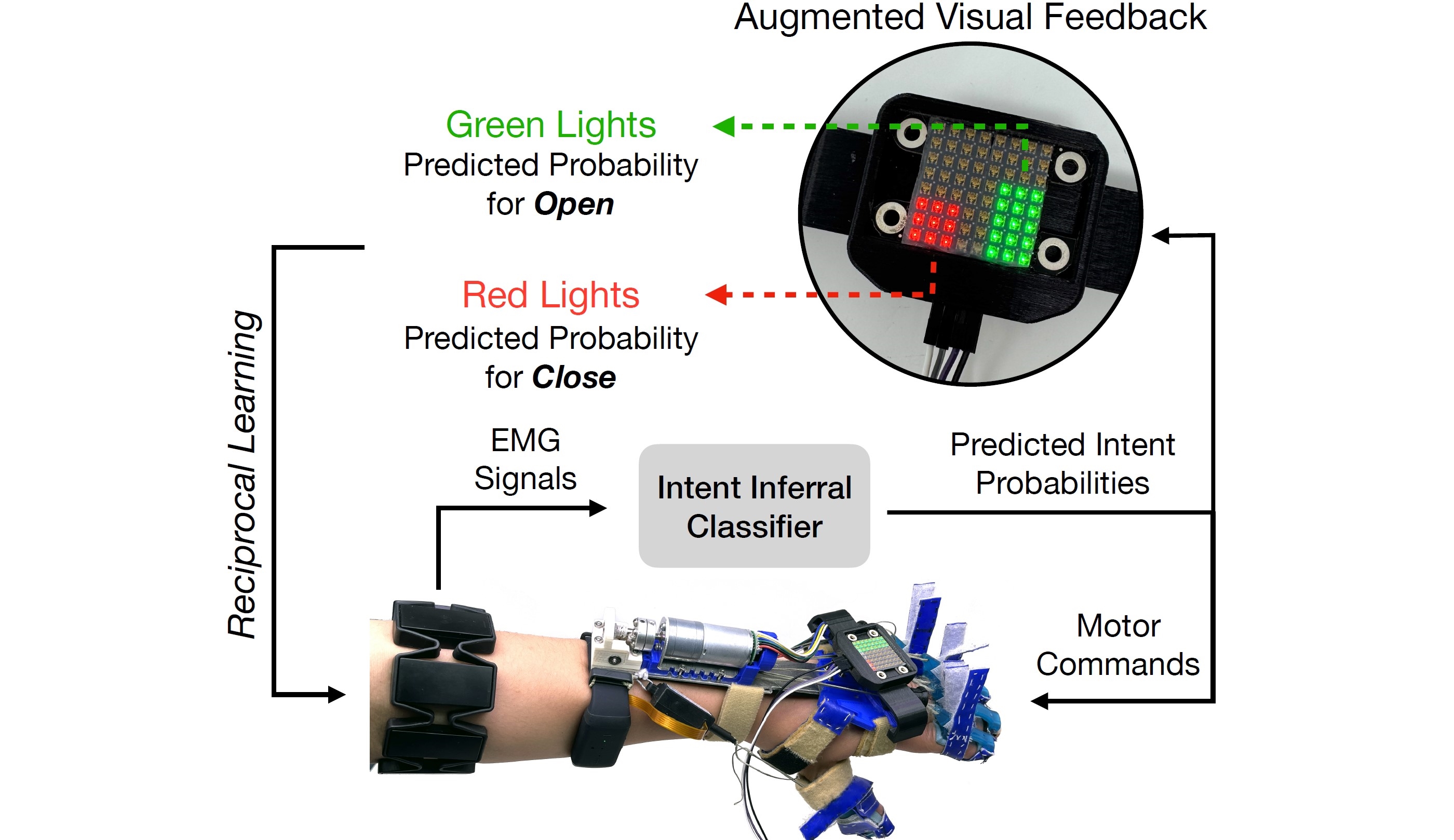
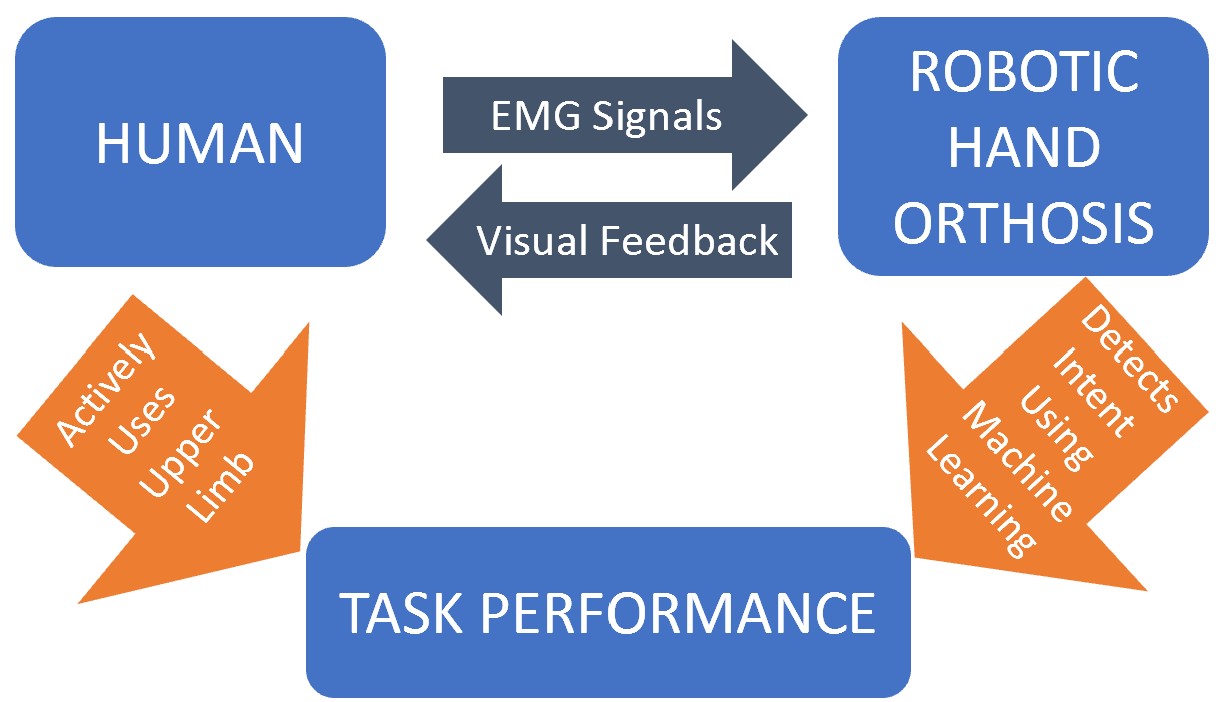
Intent inferral, the process by which a robotic device predicts a user’s intent from biosignals, offers an effective and intuitive way to control wearable robots. Classical intent inferral methods treat biosignal inputs as unidirectional ground truths for training machine learning models, where the internal state of the model is not directly observable by the user. In this work, we propose reciprocal learning, a bidirectional paradigm that facilitates human adaptation to an intent inferral classifier. Our paradigm consists of iterative, interwoven stages that alternate between updating machine learning models and guiding human adaptation with the use of augmented visual feedback. We demonstrate this paradigm in the context of controlling a robotic hand orthosis for stroke, where the device predicts open, close, and relax intents from electromyographic (EMG) signals and provides appropriate assistance. We use LED progress-bar displays to communicate to the user the predicted probabilities for open and close intents by the classifier. Our experiments with stroke subjects show reciprocal learning improving performance in a subset of subjects (two out of five) without negatively impacting performance on the others. We hypothesize that, during reciprocal learning, subjects can learn to reproduce more distinguishable muscle activation patterns and generate more separable biosignals.
Fabric Sensing of Intrinsic Hand Muscle Activity
Katelyn Lee, Runsheng Wang, Ava Chen, Lauren Winterbottom, Ho Man Colman Leung, Lisa Maria DiSalvo, Iris Xu, Jingxi Xu, Dawn M. Nilsen, Joel Stein, Xia Zhou, and Matei CiocarlieIEEE 2025 Intl. Conference on Rehabilitation Robotics (ICORR)
arXiv / poster / abstract (+) abstract (-)
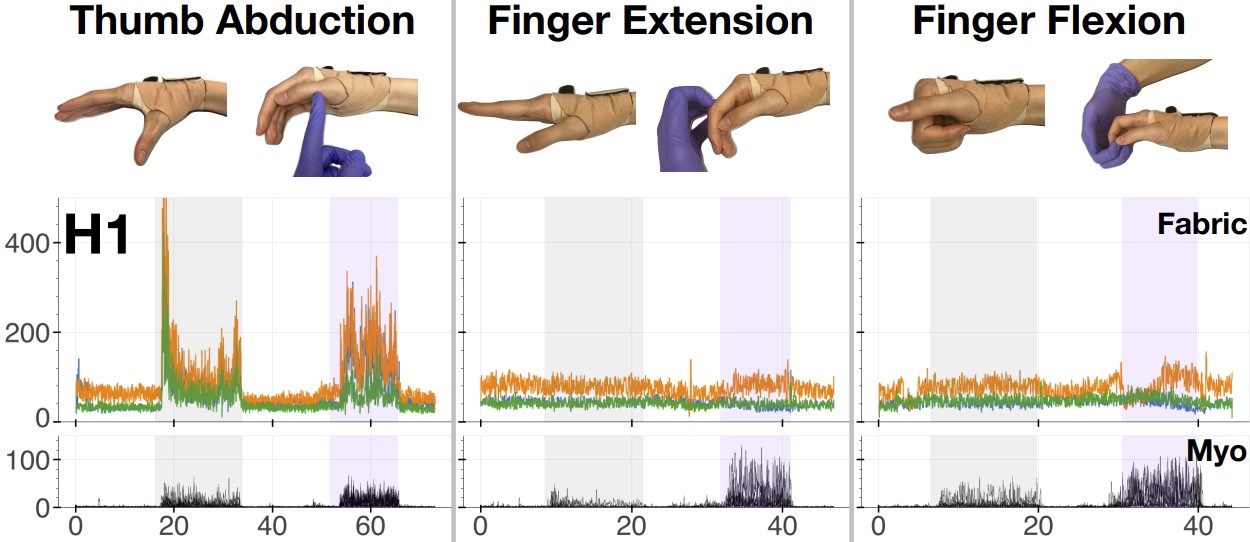
Wearable robotics have the capacity to assist stroke survivors in assisting and rehabilitating hand function. Many devices that use surface electromyographic (sEMG) for control rely on extrinsic muscle signals, since sEMG sensors are relatively easy to place on the forearm without interfering with hand activity. In this work, we target the intrinsic muscles of the thumb, which are superficial to the skin and thus potentially more accessible via sEMG sensing. However, traditional, rigid electrodes can not be placed on the hand without adding bulk and affecting hand functionality. We thus present a novel sensing sleeve that uses textile electrodes to measure sEMG activity of intrinsic thumb muscles. We evaluate the sleeve's performance on detecting thumb movements and muscle activity during both isolated and isometric muscle contractions of the thumb and fingers. This work highlights the potential of textile-based sensors as a low-cost, lightweight, and non-obtrusive alternative to conventional sEMG sensors for wearable robotics.
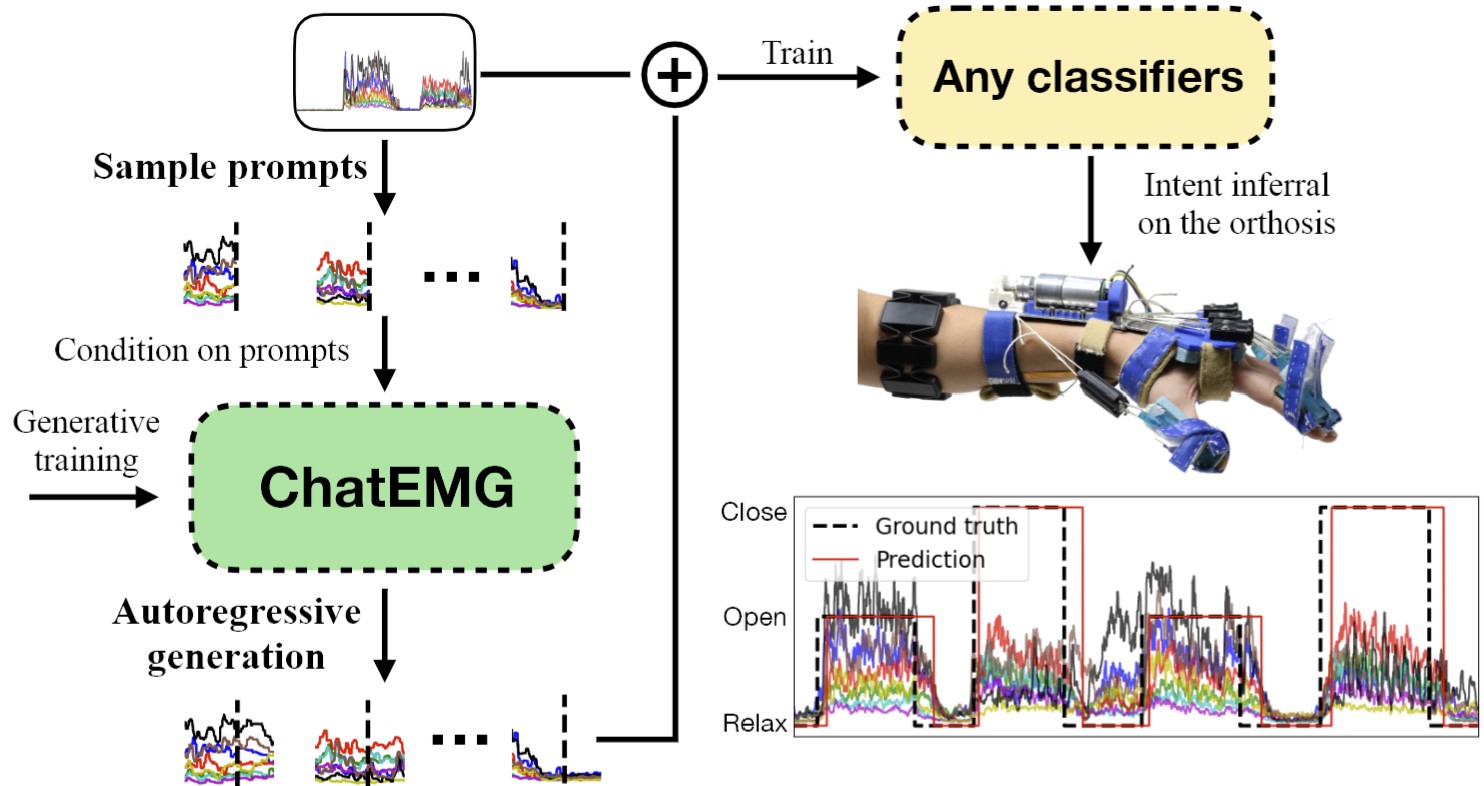
ChatEMG: Synthetic Data Generation to Control a Robotic Hand Orthosis for Stroke
Jingxi Xu*, Runsheng Wang*, Siqi Shang*, Ava Chen, Lauren Winterbottom, To‑Liang Hsu, Wenxi Chen, Khondoker Ahmed, Pedro Leandro La Rotta, Xinyue Zhu, Dawn M. Nilsen, Joel Stein, and Matei CiocarlieIEEE Robotics and Automation Letters (RA-L), 2025; presented in IEEE 2025 Intl. Conference on Robotics and Automation (ICRA)
paper / arXiv / video / project website / DSI Coverage / abstract (+) abstract (-)
Intent inferral on a hand orthosis for stroke patients is challenging due to the difficulty of data collection from impaired subjects. Additionally, EMG signals exhibit significant variations across different conditions, sessions, and subjects, making it hard for classifiers to generalize. Traditional approaches require a large labeled dataset from the new condition, session, or subject to train intent classifiers; however, this data collection process is burdensome and time-consuming. In this paper, we propose ChatEMG, an autoregressive generative model that can generate synthetic EMG signals conditioned on prompts (i.e., a given sequence of EMG signals). ChatEMG enables us to collect only a small dataset from the new condition, session, or subject and expand it with synthetic samples conditioned on prompts from this new context. ChatEMG leverages a vast repository of previous data via generative training while still remaining context-specific via prompting. Our experiments show that these synthetic samples are classifier-agnostic and can improve intent inferral accuracy for different types of classifiers. We demonstrate that our complete approach can be integrated into a single patient session, including the use of the classifier for functional orthosis-assisted tasks. To the best of our knowledge, this is the first time an intent classifier trained partially on synthetic data has been deployed for functional control of an orthosis by a stroke survivor.
Motor Learning Techniques to Enhance Training with Robotic Hand Orthoses for Stroke Survivors: Challenges and Opportunities
Lauren Winterbottom, Ava Chen, Jingxi Xu, Katelyn S. Lee, Rochelle Mendonca, Matei Ciocarlie, Joel Stein, and Dawn M. NilsenAmerican Occupational Therapy Association (AOTA) INSPIRE 2025
poster / abstract (+) abstract (-)
Occupational therapists are uniquely qualified to collaborate with engineering teams on the development of wearable robotic hand orthoses (WRHOs) and can incorporate motor learning principles and occupation-based theories into training protocols to enhance learning. WRHOs are being developed to assist the user with challenging movements and increase engagement in meaningful daily activities. These devices may also improve motor capacity tfzhrough repeated practice (Khalid et al., 2021). MyHand is a prototype WRHO for stroke survivors with minimal hand function that provides composite extension to the digits and thumb. The device uses a machine learning algorithm based on surface electromyography data to detect the user’s intent to open or close their hand. After stroke, these algorithms may have difficulty determining the intent of the hemiparetic hand due to reduced ability of the user to perform consistent actions (Xu et al., 2022). To help with this, WRHOs can provide the user with feedback (e.g., visual, auditory, or haptic) on the intent being detected to potentially improve the user’s ability to effectively use the device. However, little is currently known about how to optimize human-robot interactions so that users can efficiently and effectively learn to use such devices (Díaz et al., 2023). Our research team is investigating a novel training paradigm for the MyHand device that acknowledges the dynamic interaction between the person, the robot, and the task. In this presentation, we will discuss our experiences in designing and implementing training protocols for the MyHand device as well as challenges and opportunities for future research. Speakers will engage participants in discussion of ways that occupational therapists can participate in the development of wearable robotic technologies that support the functional needs and independence of individuals living with stroke.
2024
Clinician perceptions of a novel wearable robotic hand orthosis for post-stroke hemiparesis
Lauren Winterbottom*, Ava Chen*, Rochelle Mendonca, Dawn M. Nilsen, Matei Ciocarlie, and Joel SteinDisability and Rehabilitation, 2024
paper / author-hosted copy / NYP Coverage / abstract (+) abstract (-)
Purpose: Wearable robotic devices are currently being developed to improve upper limb function for individuals with hemiparesis after stroke. Incorporating the views of clinicians during the development of new technologies can help ensure that end products meet clinical needs and can be adopted for patient care.
Methods: In this cross-sectional mixed-methods study, an anonymous online survey was used to gather clinicians’ perceptions of a wearable robotic hand orthosis for post-stroke hemiparesis. Participants were asked about their clinical experience and provided feedback on the prototype device after viewing a video.
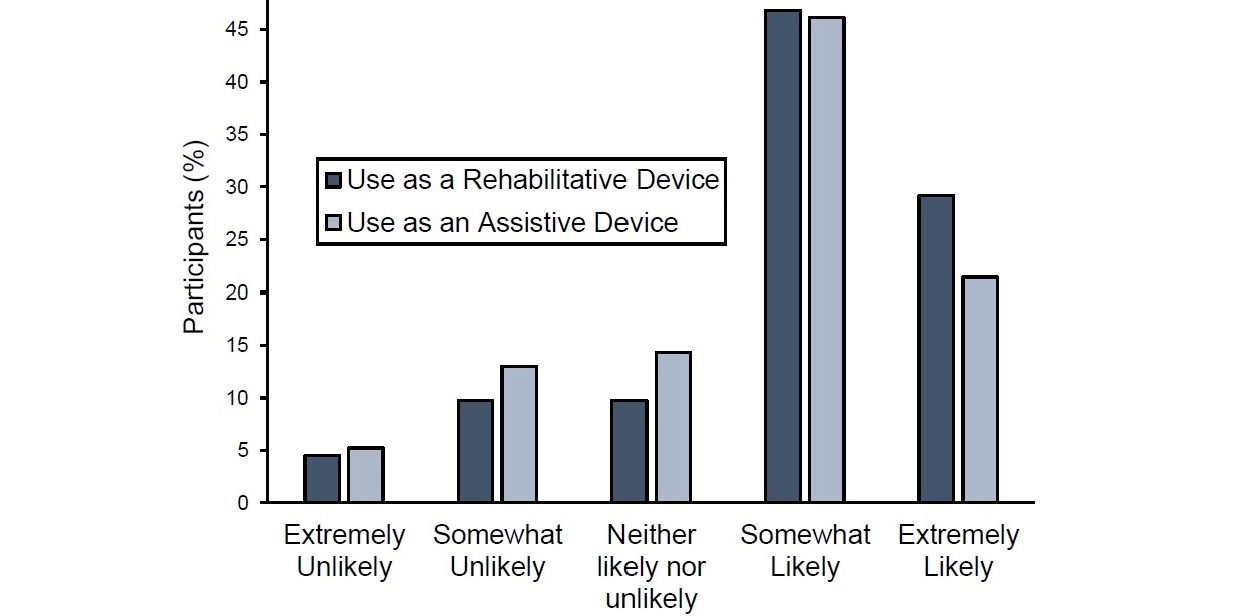
Results: 154 participants completed the survey. Only 18.8% had previous experience with robotic technology. The majority of participants (64.9%) reported that they would use the device for both rehabilitative and assistive purposes. Participants perceived that the device could be used in supervised clinical settings with all phases of stroke. Participants also indicated a need for insurance coverage and quick setup time.
Conclusions: Engaging clinicians early in the design process can help guide the development of wearable robotic devices. Both rehabilitative and assistive functions are valued by clinicians and should be considered during device development. Future research is needed to understand a broader set of stakeholders’ perspectives on utility and design.
Volitional Control of the Paretic Hand Post-Stroke Increases Finger Stiffness and Resistance to Robot-Assisted Movement
Ava Chen*, Katelyn Lee*, Lauren Winterbottom, Jingxi Xu, Connor Lee, Grace Munger, Alexandra Deli‑Ivanov, Dawn M. Nilsen, Joel Stein, and Matei CiocarlieIEEE 2024 RAS/EMBS Intl. Conference on Biomedical Robotics and Biomechatronics (BioRob)
paper / arXiv / video / abstract (+) abstract (-)
Increased effort during use of the paretic arm and hand can provoke involuntary abnormal synergy patterns and amplify stiffness effects of muscle tone for individuals after stroke, which can add difficulty for user-controlled devices to assist hand movement during functional tasks. We study how volitional effort, exerted in an attempt to open or close the hand, affects resistance to robot-assisted movement at the finger level. We perform experiments with three chronic stroke survivors to measure changes in stiffness when the user is actively exerting effort to activate ipsilateral EMG-controlled robot-assisted hand movements, compared with when the fingers are passively stretched, as well as overall effects from sustained active engagement and use. Our results suggest that active engagement of the upper extremity increases muscle tone in the finger to a much greater degree than through passive-stretch or sustained exertion over time. Potential design implications of this work suggest that developers should anticipate higher levels of finger stiffness when relying on user-driven ipsilateral control methods for assistive or rehabilitative devices for stroke.
Grasp Force Assistance via Throttle-based Wrist Angle Control on a Robotic Hand Orthosis for C6-C7 Spinal Cord Injury
Joaquin Palacios*, Alexandra Deli‑Ivanov*, Ava Chen*, Lauren Winterbottom, Dawn M. Nilsen, Joel Stein, and Matei CiocarlieIEEE Transactions on Medical Robotics and Bionics (T-MRB), 2024; presented in IEEE 2024 RAS/EMBS Intl. Conference on Biomedical Robotics and Biomechatronics (BioRob)
paper / arXiv / video / abstract (+) abstract (-)
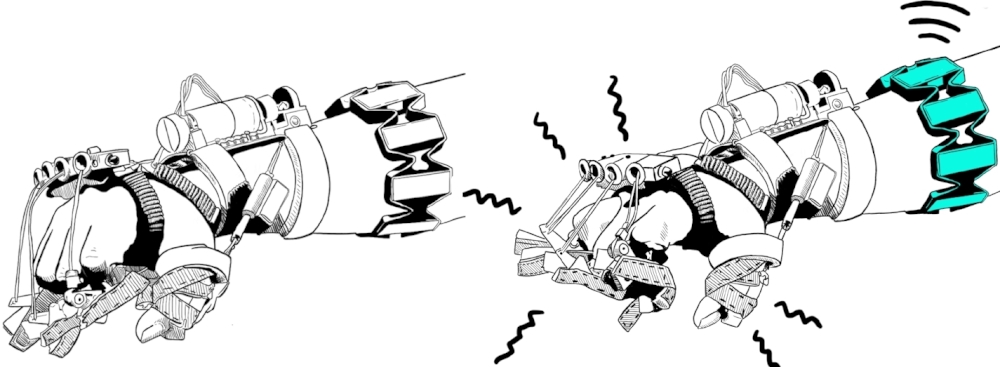
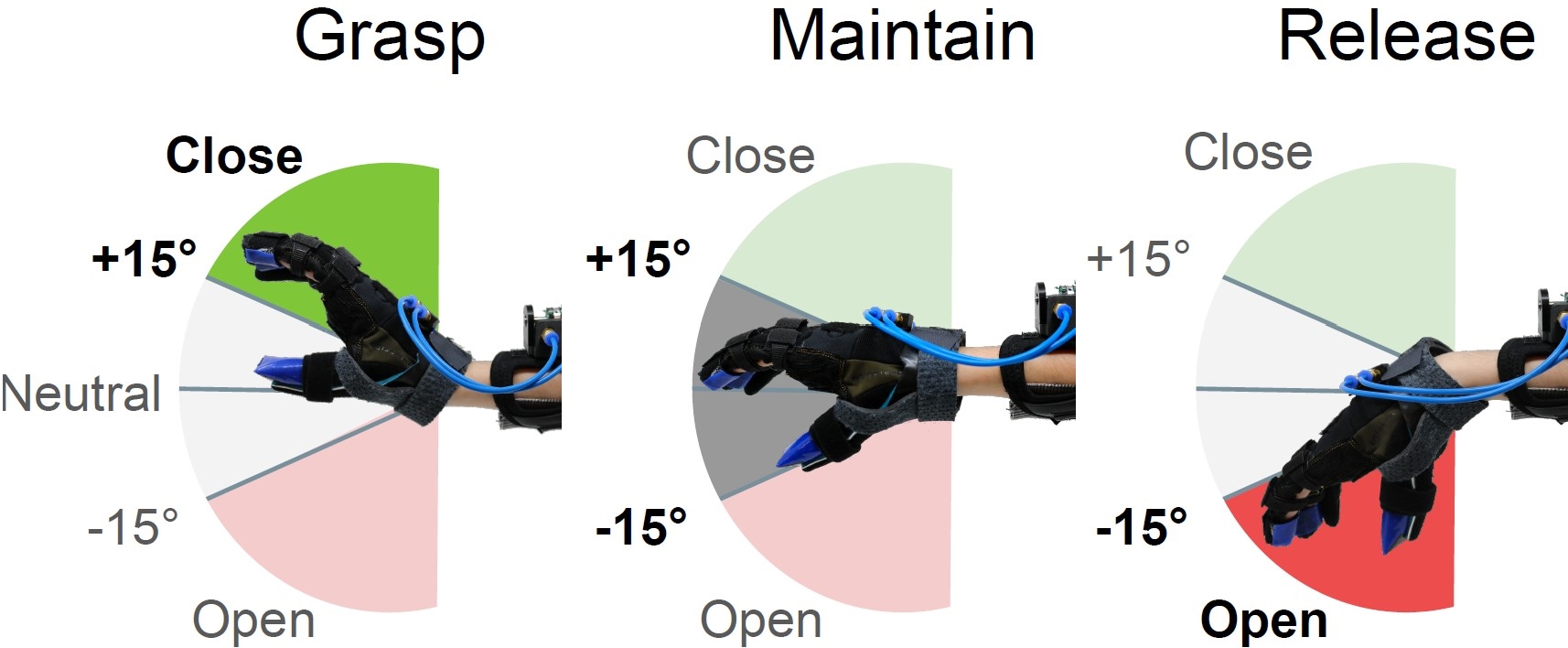
Individuals with hand paralysis resulting from a C6-C7 spinal cord injury (SCI) frequently rely on tenodesis for grasping. However, tenodesis generates limited grasping force and demands constant exertion to maintain a grasp, leading to fatigue and sometimes pain. We introduce the MyHand-SCI, a wearable robot that provides grasping assistance through motorized exotendons. Our user-driven device enables independent, ipsilateral operation via a novel control method, Throttle-based Wrist Angle (TWA), that allows users to maintain grasps without requiring continued wrist extension. A pilot case study with a person with C6 SCI shows an improvement in functional grasping and grasping force, as well as a preserved ability to modulate grasping force while using our device, thus improving their ability to manipulate everyday objects. This research is a step towards developing effective and intuitive assistive devices for individuals with hand impairments after SCI.
Meta-Learning for Fast Adaptation in Intent Inferral on a Robotic Hand Orthosis for Stroke
Pedro Leandro La Rotta*, Jingxi Xu*, Ava Chen, Lauren Winterbottom, Wenxi Chen, Dawn M. Nilsen, Joel Stein, and Matei Ciocarlie2024 IEEE/RSJ Intl. Conference on Intelligent Robots and Systems (IROS)
paper / arXiv / abstract (+) abstract (-)
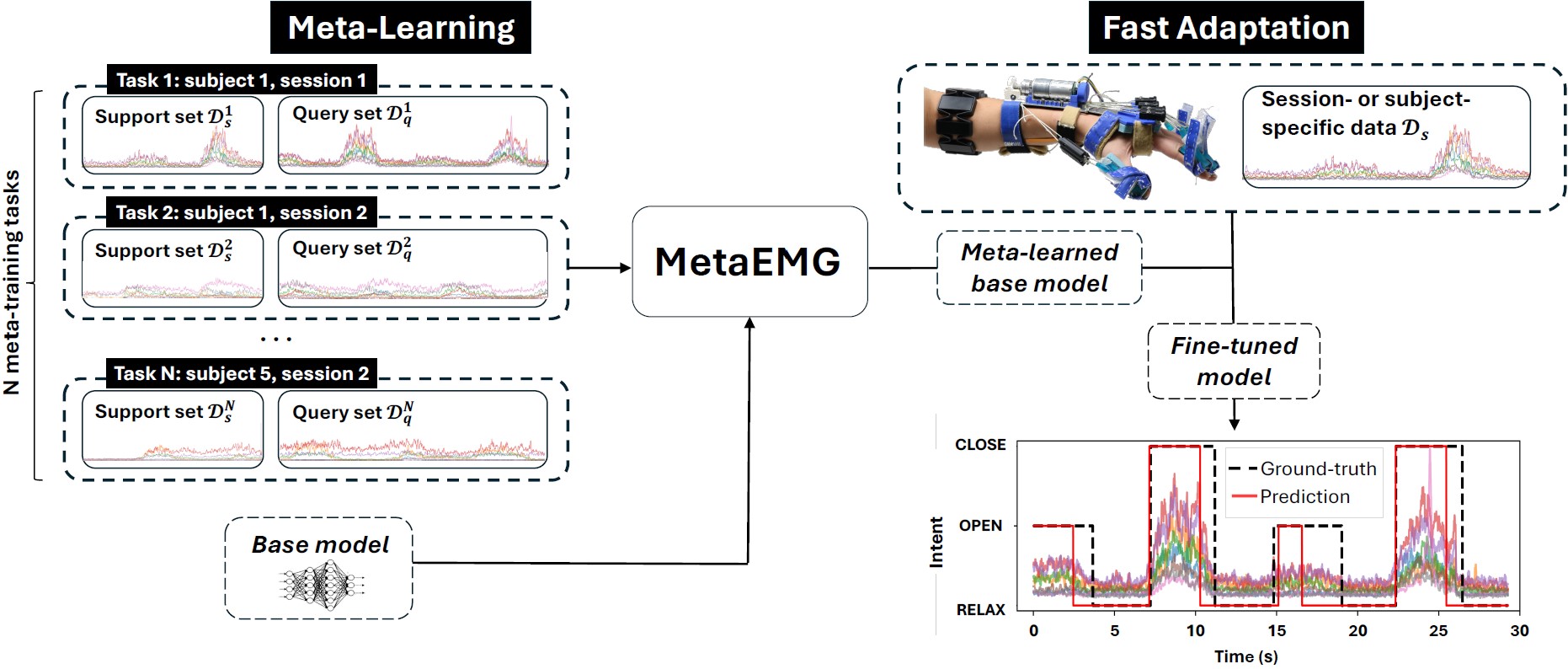
We propose MetaEMG, a meta-learning approach for fast adaptation in intent inferral on a robotic hand orthosis for stroke. One key challenge in machine learning for assistive and rehabilitative robotics with disabled-bodied subjects is the difficulty of collecting labeled training data. Muscle tone and spasticity often vary significantly among stroke subjects, and hand function can even change across different use sessions of the device for the same subject. We investigate the use of metalearning to mitigate the burden of data collection needed to adapt high-capacity neural networks to a new session or subject. Our experiments on real clinical data collected from five stroke subjects show that MetaEMG can improve the intent inferral accuracy with a small session- or subject-specific dataset and very few fine-tuning epochs. To the best of our knowledge, we are the first to formulate intent inferral on stroke subjects as a meta-learning problem and demonstrate fast adaptation to a new session or subject for controlling a robotic hand orthosis with EMG signals.
Collaboration between Occupational Therapists, Engineers, and People with Neurological Conditions in the Development of Wearable Robotic Devices
Lauren Winterbottom, Dawn M. Nilsen, Rochelle Mendonca, Ava Chen, Sara Lin, Kevin Carroll, Jingxi Xu, Matei Ciocarlie, and Joel SteinAmerican Occupational Therapy Association (AOTA) INSPIRE 2024
poster / abstract (+) abstract (-)
Wearable robotic devices for the upper limb are currently being developed to enhance arm and hand function for individuals with neurological conditions such as stroke and spinal cord injury (Xu et al., 2022; Yurkewich et al., 2022). Historically, upper limb orthotic devices have often been developed with minimal input from potential consumers and are abandoned at high rates (Sugawara et al., 2018). Incorporating the needs and values of consumers during the development of such devices is crucial and can help ensure these devices are useful and acceptable (Torricelli et al., 2020). Occupational therapists can contribute to this process through collaboration with engineering teams and people with disabilities by centering stakeholder voices and driving device design to support end-user goals for pragmatic application. In this presentation, we will discuss our experiences working with engineering teams in the development of robotic devices for neurological conditions and highlight the importance of multidisciplinary collaboration. We will present data from interviews and focus groups with individuals with stroke and spinal cord injury on their priorities for a robotic device for the hand. We will then discuss challenges and opportunities for occupational therapists when collaborating on the development of rehabilitation technologies that incorporate stakeholder priorities. We will engage participants in discussion on ways to advance the involvement of occupational therapists in technology development that supports the needs of individuals living with neurological conditions.
Fabric EMG Sensing for Robotic Orthosis Control
Katelyn Lee, Lisa Maria DiSalvo, Iris Xu, Qijia Shao, Ava Chen, Xia Zhou, and Matei CiocarlieIEEE 2024 RAS/EMBS Intl. Conference on Biomedical Robotics and Biomechatronics (BioRob) Workshop: Building Responsive Body-Machine Interfaces with Biosignals and Robotic Exoskeletons
poster / abstract (+) abstract (-)
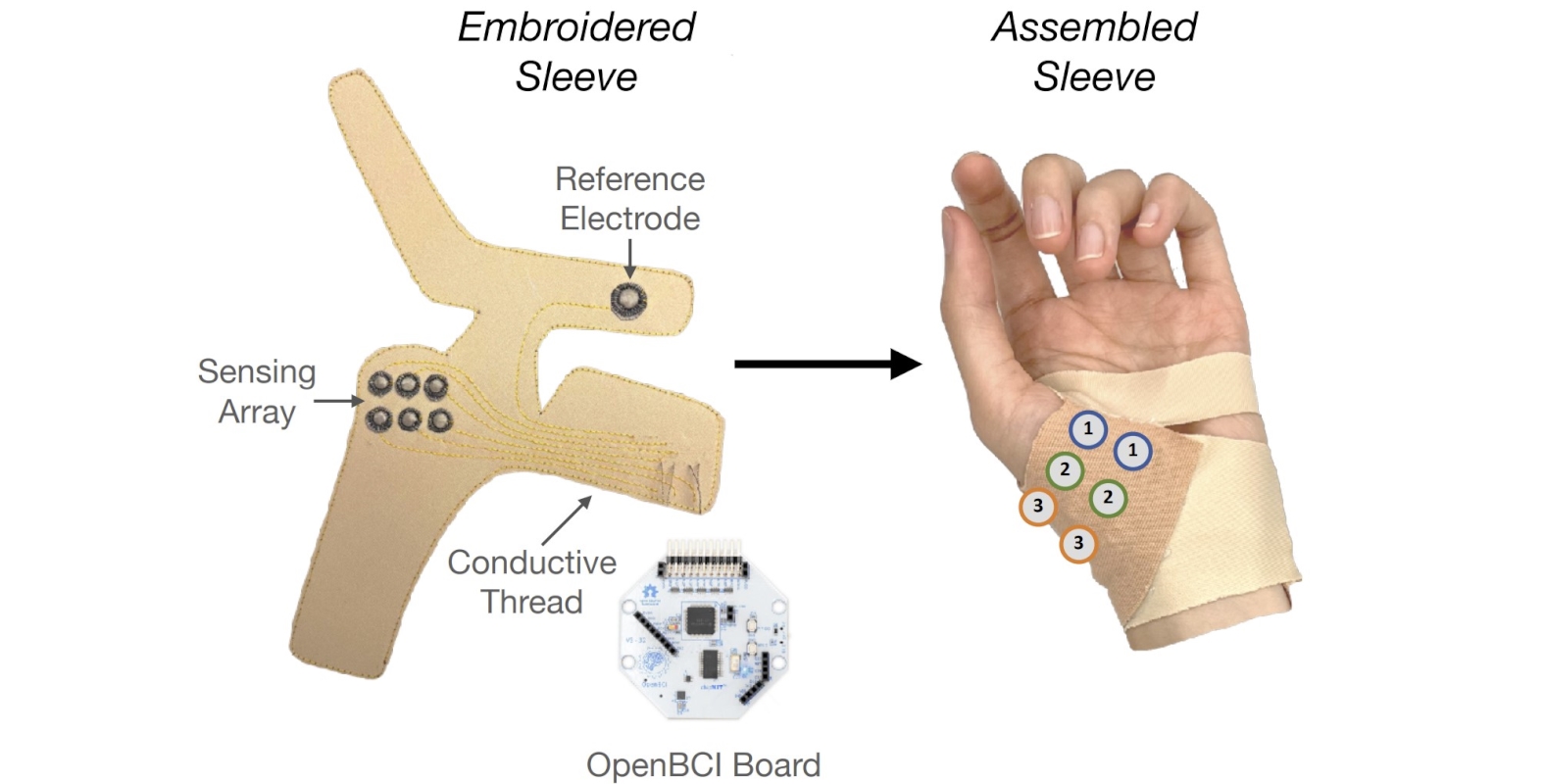
While ipsilateral control of wearable robotic orthoses is both intuitive and user-driven, complications like muscle spasticity in the impaired arm present a challenging problem for robust usage in stroke survivors. Many devices leverage the residual muscle activity of the hand extensor muscles in the forearm via surface electromyography (sEMG) sensors to discern user intent in conjunction with machine learning algorithms. Recent work, however, has demonstrated that volitional effort for full finger extension during hand opening increases finger stiffness and spasticity, thereby impeding optimal use of the device. To this, we seek to reduce hand spasticity induced by full hand extension by asking stroke participants to engage only thumb movement to control the device, rather than their entire hand. The three muscles that control thumb abduction, opposition, and flexion lie in the thenar eminence, a bundle of intrinsic hand muscles at the base of the thumb. Notably, these muscles are known to have decreased hypertonia, but due to the contours of the palm, attaching muscle sensors to the thenar eminence have been difficult. Previous work with sensing this region have used adhesive electromyography sensors to maintain skin contact. A promising alternative to adhesive sEMG sensors is fabric, which, unlike adhesive, is reusable, flexible, and comfortable to don, doff, and wear. We present a fabric sEMG sensor built with off the shelf materials to sense muscle activity in the thenar eminence. To the best of our knowledge, we are the first to incorporate fabric sEMG sensors to sense intrinsic muscle activity in the hand for control of a robotic device. The fabric sensor is made of three biopotential sensing electrodes, where each electrode is made of a layer of conductive fabric on top of a thick fabric pad to improve skin contact. The sensors are embroidered to an elastic fabric thumb sleeve and connected via conductive thread to the OpenBCI Cyton board for biopotential sensing. Preliminary testing of the fabric sensor, paired with a commercial sEMG sensor, in healthy participants demonstrates its capacity as an electromyography sensor in the thumb. By changing the control input to thumb engagement, rather than whole hand engagement, we aim to decrease spasticity while wearing the device. And by combining this additional fabric sEMG sensor with a commercial, 8-channel forearm sEMG sensor, we aim to improve classification accuracy when applied to our current machine learning algorithm. Fabric electromyography sensing is a low-cost, light-weight, and scalable technology that motivates future work in its improvement and adoption.
2023

Towards Tenodesis-Modulated Control of an Assistive Hand Exoskeleton for SCI
Joaquin Palacios*, Alexandra Deli‑Ivanov*, Ava Chen, Lauren Winterbottom, Dawn M. Nilsen, Joel Stein, and Matei CiocarlieIEEE/RSJ 2023 Intl. Conference on Intelligent Robots and Systems (IROS) Workshop: Assistive Robotics for Citizens
workshop paper / arXiv / poster
2022

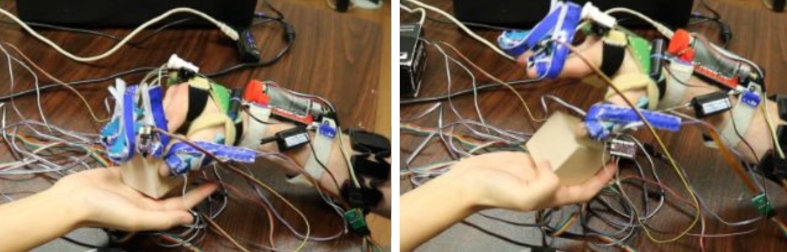
Thumb Stabilization and Assistance in a Robotic Hand Orthosis for Post-Stroke Hemiparesis
Ava Chen, Lauren Winterbottom, Sangwoo Park, Jingxi Xu, Dawn Nilsen, Joel Stein, and Matei CiocarlieIEEE Robotics and Automation Letters (RA-L), 2022; presented in IEEE RAS/EMBS 2022 Intl. Conference on Biomedical Robotics and Biomechatronics (BioRob)
Best Paper Finalist!
We propose a dual-cable method of stabilizing the thumb in the context of a hand orthosis designed for individuals with upper extremity hemiparesis after stroke. This cable network adds opposition/reposition capabilities to the thumb, and increases the likelihood of forming a hand pose that can successfully manipulate objects. In addition to a passive-thumb version (where both cables are of fixed length), our approach also allows for a single-actuator active-thumb version (where the extension cable is actuated while the abductor remains passive), which allows a range of motion intended to facilitate creating and maintaining grasps. We performed experiments with five chronic stroke survivors consisting of unimanual resistive-pull tasks and bimanual twisting tasks with simulated real-world objects; these explored the effects of thumb assistance on grasp stability and functional range of motion. Our results show that both active- and passive-thumb versions achieved similar performance in terms of improving grasp force generation over a no-device baseline, but active thumb stabilization enabled users to maintain grasps for longer durations.

Design of Spiral-Cable Forearm Exoskeleton to Provide Supination Adjustment for Hemiparetic Stroke Subjects
Ava Chen, Lauren Winterbottom, Katherine O'Reilly, Sangwoo Park, Dawn Nilsen, Joel Stein, and Matei CiocarlieIEEE 2022 Intl. Conference on Rehabilitation Robotics (ICORR)
We present the development of a cable-based passive forearm exoskeleton that is designed to assist supination for hemiparetic stroke survivors. Our device uniquely provides torque sufficient for counteracting spasticity within a below-elbow apparatus. The mechanism consists of a spiral single-tendon routing embedded in a rigid forearm brace and terminated at the hand and upper-forearm. A spool with an internal releasable-ratchet mechanism allows the user to manually retract the tendon and rotate the hand to counteract involuntary pronation synergies due to stroke. We characterize the mechanism with benchtop testing and five healthy subjects, and perform a preliminary assessment of the exoskeleton with a single chronic stroke subject having minimal supination ability. The mechanism can be integrated into an existing active hand-opening orthosis to enable supination support during grasping tasks, and also allows for a future actuated supination strategy.
Adaptive Semi-Supervised Intent Inferral to Control a Powered Hand Orthosis for Stroke
Jingxi Xu, Cassie Meeker, Ava Chen, Lauren Winterbottom, Michaela Fraser, Sangwoo Park, Lynne M. Weber, Mitchell Miya, Dawn Nilsen, Joel Stein, and Matei CiocarlieIEEE 2022 Intl. Conference on Robotics and Automation (ICRA)
In order to provide therapy in a functional context, controls for wearable orthoses need to be robust and intuitive. We have previously introduced an intuitive, user-driven, EMG based method to operate a robotic hand orthosis, but the process of training a control that is robust to concept drift (changes in the input signal) places a substantial burden on the user. In this paper, we explore semi-supervised learning as a paradigm for controlling a powered hand orthosis for stroke subjects. To the best of our knowledge, this is the first use of semi-supervised learning for an orthotic application. Specifically, we propose a disagreement-based semi-supervision algorithm for handling intrasession concept drift based on multimodal ipsilateral sensing. We evaluate the performance of our algorithm on data collected from five stroke subjects. Our results show that the proposed algorithm helps the device adapt to intrasession drift using unlabeled data and reduces the training burden placed on the user. We also validate the feasibility of our proposed algorithm with a functional task; in these experiments, two subjects successfully completed multiple instances of a pick-and-handover task.
2021 and older

Rapid Mid-Jump Production of High-Performance Silk by Jumping Spiders
Ava Chen, Kris Kim, and Paul ShambleCurrent Biology, 2021
Jumping spiders (Salticidae) do not rely on webs to capture their prey, but they do spin a silk dragline behind them as they move through their habitat. They also spin this dragline during jumps, continuously connecting them with the surface they leapt from. Since spiders cannot spin silk in advance, this silk must be spun at the same speed as the spider jumps—in effect, requiring spin speeds over ten times faster than typical. Past work in other spider species has found that silk spinning rates in excess of walking and web-building speeds (~2-20mm/s) result in lower quality silk and even dragline failure. Surprisingly, here we found that despite being spun at high speeds (~500-700mm/s; 100-140 body lengths/s), jump-spun silk showed consistent, uniform structure as well as the high-performance qualities characteristic of silk spun by other spiders, including orb-weaving species, at low speeds. Toughness of this jump-spun silk (mean = 281.9MJ/m3) even surpassed reported values for all but the toughest orb-weaver draglines. This provides the first evidence that salticids are capable of spinning high-performance silk and are able to do so extremely rapidly under natural conditions.
————— supplemental files download link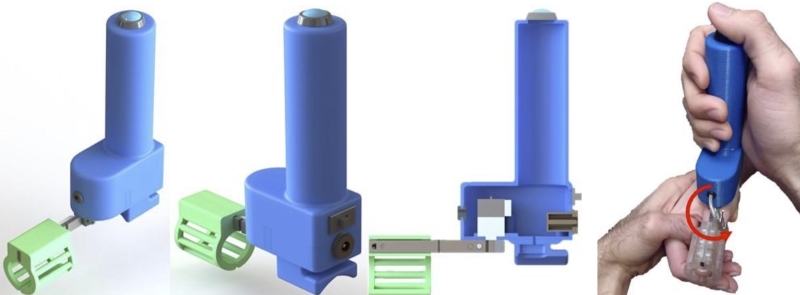
A Device for Quantitative Analysis of the Thumb Ulnar Collateral Ligament
Thomas Cervantes, Woojeong E. Byun*, Ava Chen*, Kris Kim*, Kaitlyn Nealon*, Jay Connor, and Alexander SlocumASME 2018 Design of Medical Devices Conference
A device to quantitatively assess the ulnar collateral ligament of the thumb was developed to facilitate rapid and accurate diagnosis of the ligamentous injury known as Skier’s thumb.